[2상 스테핑/5상 스테핑 컨트롤러] 스테핑모터의 구조 차이
2상 STEP / 5상 STEP의 구조 차이
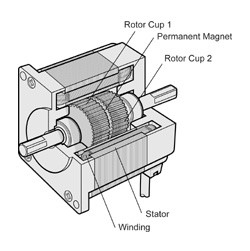
2상 모터와 5상 모터에는 두 가지 중요한 차이점이 있습니다. 첫 번째는 기계적입니다. 스텝 모터는 기본적으로 고정자와 회전자의 두 부분으로 구성됩니다. 차례로 회전자는 세 가지 구성 요소로 구성됩니다. 회전자(1), 회전자(2) 및 영구 자석을 포함합니다. 2상 모터에서 고정자는 작은 이빨을 가진 8개의 자극으로 구성되며 5상 모터 고정자는 10개의 자극으로 구성됩니다. 고정자의 극은 각각 권선으로 제공됩니다.
2상과 5상 사이의 두 번째 차이점은 상(相) 수입니다. 2 상 모터는 "A"상과 "B"상의 두 상을 가지며, 5 상 모터는 5개의 상을 갖습니다. 본질적으로, 상의 수는 로터를 당기기 위해 순차적으로 에너지가 공급되는 극의 다른 조합을 나타냅니다.
분해능
구조적으로 5상 모터는 2상 모터와 다르지 않습니다. 두 모터의 로터에는 50개의 톱니가 있습니다. 차이점은 5상 모터가 10극 (2상 당 2개)을 갖기 때문에 회전자는 다음 단계에서 1/10 피치 만큼만 움직여야한다는 것입니다. 2상 모터에서 회전자는 다음 상 (8극, 상 당 4개)과 정렬되도록 이빨(톱니) 피치의 1/4을 움직여야합니다.
그 결과, 2상은 1회전 당 200스텝, 1스텝 당 1.8° , 5상은 1회전 당 500스텝, 1스텝 당 0.72° 를 움직이게 됩니다. 마이크로스텝 드라이버와 결합하면 5상 모터는 0.00288 °만큼 작은 스텝을 만들 수 있지만, 위치 정밀도 및 반복성은 모터의 기계적 정확도에 영향을 받습니다. 2상 및 5상 모터의 기계적 정확도는 ±3분 (0.05° )입니다.

진동
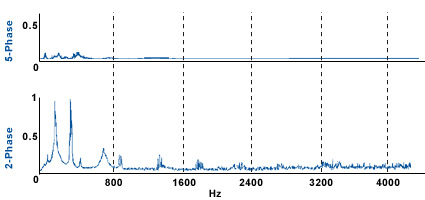
2상 모터의 스텝각인 1.8 °보다 5상 모터의 스텝각인 0.72°가 더 작기 때문에 5상 모터의 진동은 2상보다 훨씬 적습니다. 아래 그래프는 5상 모터에서 발생한 진동과 2상 모터에서 발생한 진동을 보여줍니다. 보시다시피 2상 모터는 훨씬 더 많은 진동을 발생시킵니다.
* 아래 그래프는 회전 당 5K 스텝의 마이크로 스텝을 나타냅니다. 이 그래프는 양축 모터에 제너레이터를 부착하여 만들었습니다. 모터가 진동하면서 생성된 전압이 그래프로 나타납니다. 모터가 진동할수록 발생하는 전압은 커집니다.
펄스 제어 타입의 스텝모터와 사용이 가능한 모션 컨트롤러를 소개합니다~
아래 이미지를 클릭하시면 컨트롤러 소개와 상담/카탈로그 신청이 가능합니다.
